
Hi liebe Leute,
kaum habe ich etwas Platz durch das neu bezogene Domizil,
kommt auch schon flugs wieder eine Idee in mir auf, die ich
nun sicher schon seit 15 Jahren mit mir führe.....
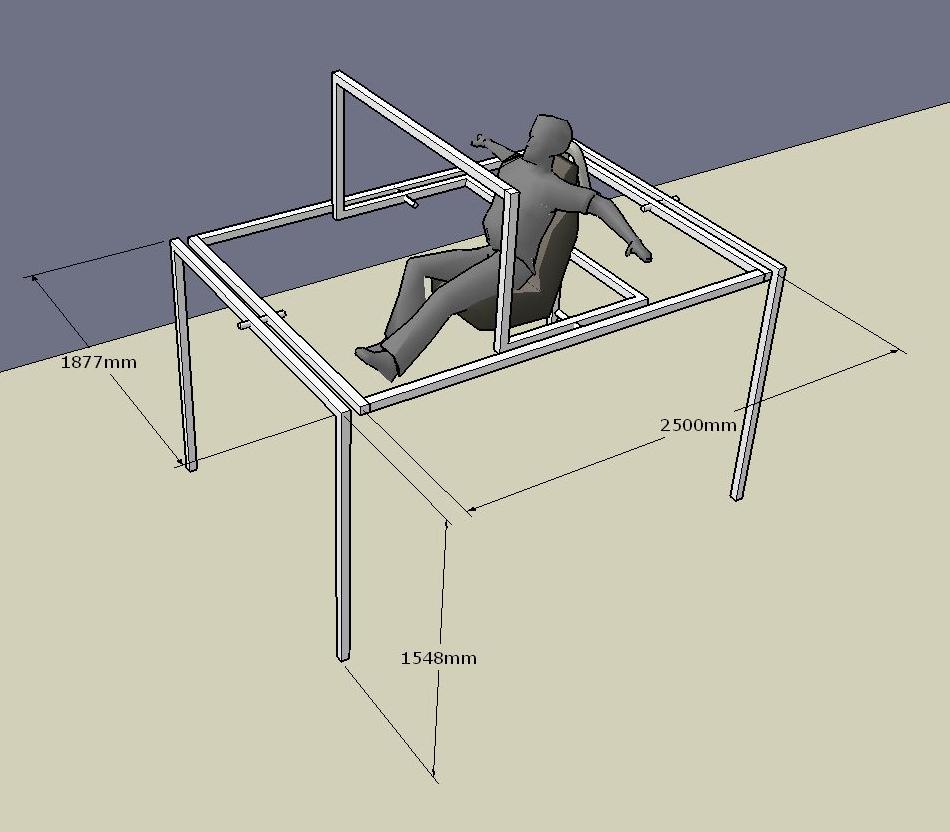
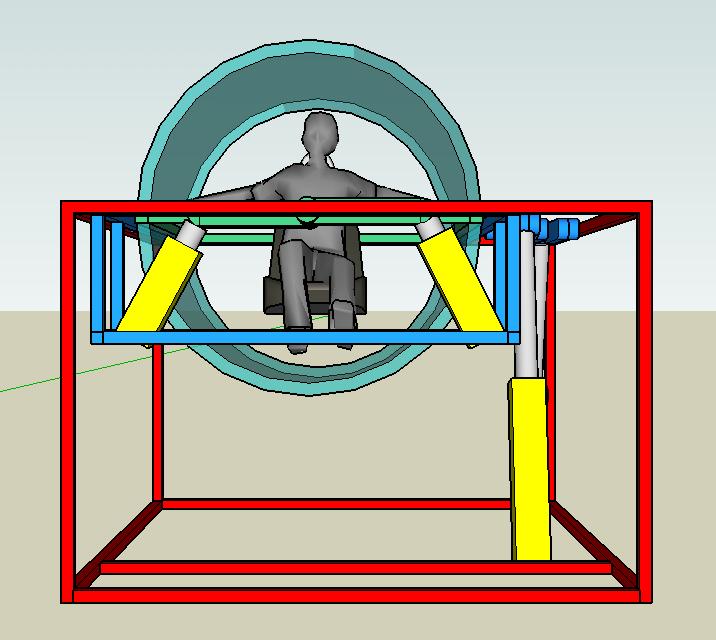
Ein erster Grobentwurf, statisch noch nicht gerechnet oder
designed, Antriebstechnik wohl pneumatisch mit 4 Druckluft-
zylindern, Ansteuerung ggf. per LUA mit Zweitrechner, Display
entweder großes TFT oder Z800 Visor in Kombination mit
TrackIR. Interessierte können sich das Google Sketchup File
[url=http://calisto.info/jabog/pit/u09.skpp3t]hier[/urlp3t] downloaden.
Wer mit Sketchup etwas versiert ist, kann die zwei Untergruppen
im Tool selektieren und um die eingezeichneten Achszylinder drehen.
So bekommt man einen sehr guten Eindruck von der vollen 360°
Drehbarkeit, etwa um den Massenschwerpunkt des inneren Systems .... 8)
[imgp3t]http://calisto.info/jabog/pit/u09.jpg[/imgp3t]
Simpit
Moderator: JaBoG32 Stab
Simpit
[imgybz]http://www.calisto.info/jabog/jabogcallisto3.jpg[/imgybz]
1. Staffel "Threshing Tigers", 1. Schwarm "Tigers", Second Element Lead
1. Staffel "Threshing Tigers", 1. Schwarm "Tigers", Second Element Lead


WOW!!!
ERSTENS: Ich find die Idee absolut Oberaffentittenmegaturbogeil!
ZWEITENS: Du hast die Euler-Winkel-Sequenz nicht beachtet!!!
...so wie Du die Gimbal konstruiert hast, wird das Nix.
Kleines Gedankenexperiment:
Der Junge Mann im Cockpit, nennen wir ihn "Otsillac"(Name von der Redaktion geändert ), zieht die Nase seines neuen oberaffentittenmegaturbogeilen Pits auf etwa 80° Pitch nach oben. Nun gibt er einen beherzten Querruderausschlag und erwartet eine 180° Rolle um die Längs Achse. Leider findet er sich jetzt inverted mit 80° Nose Down wieder!!!
), zieht die Nase seines neuen oberaffentittenmegaturbogeilen Pits auf etwa 80° Pitch nach oben. Nun gibt er einen beherzten Querruderausschlag und erwartet eine 180° Rolle um die Längs Achse. Leider findet er sich jetzt inverted mit 80° Nose Down wieder!!!
DARUM:
Die Euler-Winkel-Sequenz beachten! Die Gimbal von Außen nach Innen...
1. Heading (entfällt)
2. Pitch
3. Roll
Bei Deinem ausgeprägten technischen Verständnis sollte jetzt der Groschen gefallen sein.
Es gibt noch einige andere gravierende Punkte zu beachten, wenn Du nicht willst, dass Deine Actuators die Konstruktion beim ersten Looping zerrupfen. Der Durchgang der Nase durch die Vertikale z.B. will gut durchdacht sein!!!
Und noch was:
Die Ganze Konstruktion mit Pilot wird wohl auf annähernd 200 Kg kommen. Wenn so ein Teil dann realitätsnah mit einer Winkelbeschleunigung von 360°/s² losdreht, entstehen schon gehörige Momente. Die Actuators die sowas leisten sind dann aber auch durchaus in der Lage dem armen Otsillac schweren Schaden zuzufügen.
Denk mal an folgendes Szenario:
Otsillac fliegt mit seinem neuen mega-Pit einige gediegene Platzrunden am Samstag Vormittag, während sein Schatzimausi shoppen geht. Wenn jetzt der Roll-Actuator durch technischen defekt anfängt mit max. RPM nach links (wahlweise auch Rechts) zu rollen, findet Schatzimausi bei ihrer Rückkehr den guten Otsillac wahrscheinlich nur noch in Stücken vor.
Was Du da planst hat es auf jeden Fall in sich!!! Trotzdem find ich's absolut scharf, und würde mich freuen Dich unterstützen zu können. Müssen wir auf jeden Fall mal drüber quatschen. Ich trau Dir das schon zu, ist halt nur 'n abgefahren heisses Projekt
...aber wir sind ja schliesslich auch JaBoGs
Dirty
p.s. Schon Drehstrom im Haus?
ERSTENS: Ich find die Idee absolut Oberaffentittenmegaturbogeil!
ZWEITENS: Du hast die Euler-Winkel-Sequenz nicht beachtet!!!
...so wie Du die Gimbal konstruiert hast, wird das Nix.
Kleines Gedankenexperiment:
Der Junge Mann im Cockpit, nennen wir ihn "Otsillac"(Name von der Redaktion geändert
DARUM:
Die Euler-Winkel-Sequenz beachten! Die Gimbal von Außen nach Innen...
1. Heading (entfällt)
2. Pitch
3. Roll
Bei Deinem ausgeprägten technischen Verständnis sollte jetzt der Groschen gefallen sein.
Es gibt noch einige andere gravierende Punkte zu beachten, wenn Du nicht willst, dass Deine Actuators die Konstruktion beim ersten Looping zerrupfen. Der Durchgang der Nase durch die Vertikale z.B. will gut durchdacht sein!!!
Und noch was:
Die Ganze Konstruktion mit Pilot wird wohl auf annähernd 200 Kg kommen. Wenn so ein Teil dann realitätsnah mit einer Winkelbeschleunigung von 360°/s² losdreht, entstehen schon gehörige Momente. Die Actuators die sowas leisten sind dann aber auch durchaus in der Lage dem armen Otsillac schweren Schaden zuzufügen.
Denk mal an folgendes Szenario:
Otsillac fliegt mit seinem neuen mega-Pit einige gediegene Platzrunden am Samstag Vormittag, während sein Schatzimausi shoppen geht. Wenn jetzt der Roll-Actuator durch technischen defekt anfängt mit max. RPM nach links (wahlweise auch Rechts) zu rollen, findet Schatzimausi bei ihrer Rückkehr den guten Otsillac wahrscheinlich nur noch in Stücken vor.
Was Du da planst hat es auf jeden Fall in sich!!! Trotzdem find ich's absolut scharf, und würde mich freuen Dich unterstützen zu können. Müssen wir auf jeden Fall mal drüber quatschen. Ich trau Dir das schon zu, ist halt nur 'n abgefahren heisses Projekt
...aber wir sind ja schliesslich auch JaBoGs
Dirty
p.s. Schon Drehstrom im Haus?
It's not the speed that kills you,... it's the sudden stop!!!
@Pjotr: Ich habe gelernt, dass man *lange* bevor man anfängt, an einem Pit zu bauen, sich eine
ganze Reihe von Fragestellungen vorher klarmachen und festlegen sollte. Dann anschließend folgt
eine sehr intensive Recherchephase, um alle relevanten Informationen zu haben, bevor man Tatsachen
schafft. Anschließend kommt der eigentliche Plan zur Konstruktion und erst ganz am Ende die Ausführung.
Insofern bin ich von der Realisierung des Wahnsinns noch ein Stück entfernt....
@Dirty: Danke für die Hinweise.
Die Achsen sind in jedem Fall austauschenswürdig, damit der gute Euler sich nicht im Grab rumdreht!
Der Nasendurchgang fordert in der Tat aufmerksamkeit. Ist aber konstruktiv recht einfach lösbar, ohne
dass sich Druckzylinder im Weg sind oder Kabel und Schläuche abreißen. Ich muss nur erst ein CAD
Tool finden, mit dem ich die Bewegungssimulation und bewegliche Maschinenteile designen kann.
Google Sketchup war nur ein erster Wurf.
Und: Trotz sehr geschickter Austarierung der Schwerpunkt und dadurch Minimierung der notwendigen
Kräfte besteht wie du schon sagst Risiken für Leib und Leben, aber auch die Kosten für derartige
Aktuatoren sind noch ein ungelöstes Thema, da ich keinen fünfstelligen Betrag investieren möchte.
Mehrfach redundanten Notauslösungen für Druck und Strom + Schnellbremsung werden aber auf
jedenfall Eingang finden, da man aus dem Pit ja schlecht ejecten kann.
ganze Reihe von Fragestellungen vorher klarmachen und festlegen sollte. Dann anschließend folgt
eine sehr intensive Recherchephase, um alle relevanten Informationen zu haben, bevor man Tatsachen
schafft. Anschließend kommt der eigentliche Plan zur Konstruktion und erst ganz am Ende die Ausführung.
Insofern bin ich von der Realisierung des Wahnsinns noch ein Stück entfernt....
@Dirty: Danke für die Hinweise.
Die Achsen sind in jedem Fall austauschenswürdig, damit der gute Euler sich nicht im Grab rumdreht!
Der Nasendurchgang fordert in der Tat aufmerksamkeit. Ist aber konstruktiv recht einfach lösbar, ohne
dass sich Druckzylinder im Weg sind oder Kabel und Schläuche abreißen. Ich muss nur erst ein CAD
Tool finden, mit dem ich die Bewegungssimulation und bewegliche Maschinenteile designen kann.
Google Sketchup war nur ein erster Wurf.
Und: Trotz sehr geschickter Austarierung der Schwerpunkt und dadurch Minimierung der notwendigen
Kräfte besteht wie du schon sagst Risiken für Leib und Leben, aber auch die Kosten für derartige
Aktuatoren sind noch ein ungelöstes Thema, da ich keinen fünfstelligen Betrag investieren möchte.
Mehrfach redundanten Notauslösungen für Druck und Strom + Schnellbremsung werden aber auf
jedenfall Eingang finden, da man aus dem Pit ja schlecht ejecten kann.
[imgybz]http://www.calisto.info/jabog/jabogcallisto3.jpg[/imgybz]
1. Staffel "Threshing Tigers", 1. Schwarm "Tigers", Second Element Lead
1. Staffel "Threshing Tigers", 1. Schwarm "Tigers", Second Element Lead
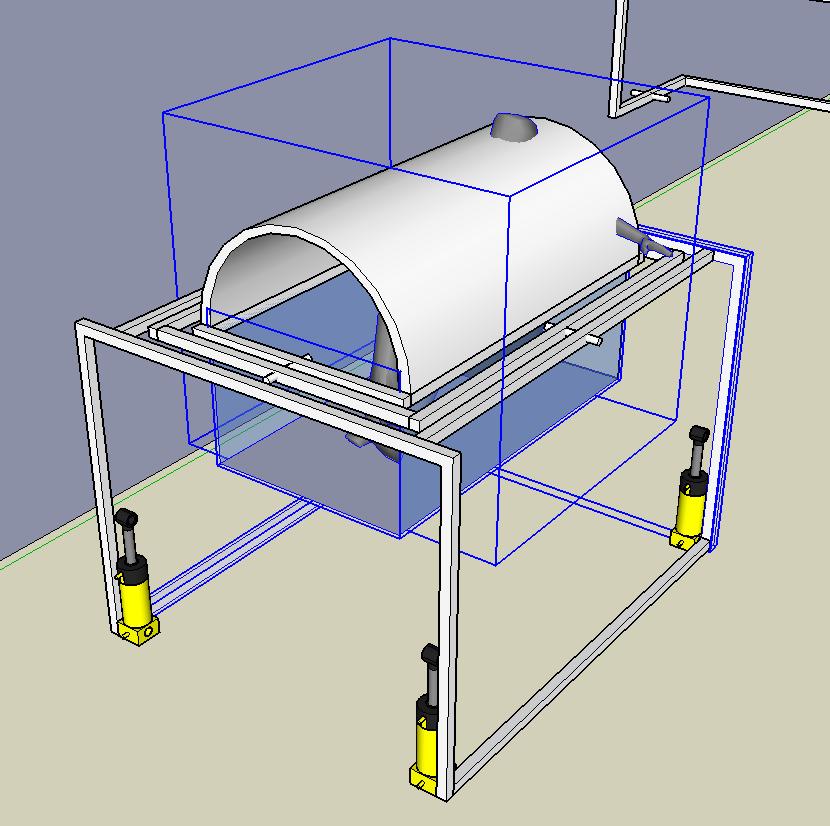
Ein neuer Zwischenstand... ist aber noch einiges im Argen.
Kopfschutzhöhe, Breite des Canopys, Lage und Zuordnung
der Hydraulik Zylinder..... alles in Arbeit
[imgsuw]http://calisto.info/jabog/1.jpg[/imgsuw]
Kopfschutzhöhe, Breite des Canopys, Lage und Zuordnung
der Hydraulik Zylinder..... alles in Arbeit
[imgsuw]http://calisto.info/jabog/1.jpg[/imgsuw]
[imgybz]http://www.calisto.info/jabog/jabogcallisto3.jpg[/imgybz]
1. Staffel "Threshing Tigers", 1. Schwarm "Tigers", Second Element Lead
1. Staffel "Threshing Tigers", 1. Schwarm "Tigers", Second Element Lead

Korrekt, ist LEGO. Hab die im Google Fundus entdeckt, für den Zweck skaliert und
nur als Gedankenstütze eingebaut. Allerdings ist's eher Pneumatik als Hydraulik.
Das gäb sonst ne Riesensschweinerei im LEGO Kasten, wenn die lieben Kleinen mit
dem Hydrauliköl rumsauen Momentan gehe ich auch eher von Pneumatik für
das "Lock Pit" aus. Antrieb per Hydraulik oder Stellmotor ist vermutlich unbezahlbar.
UPDATE:
[imgegc]http://calisto.info/jabog/pit/t13_1.jpg[/imgegc]
[imgegc]http://calisto.info/jabog/pit/t13_2.jpg[/imgegc]
[imgegc]http://calisto.info/jabog/pit/t13_3.jpg[/imgegc]
nur als Gedankenstütze eingebaut. Allerdings ist's eher Pneumatik als Hydraulik.
Das gäb sonst ne Riesensschweinerei im LEGO Kasten, wenn die lieben Kleinen mit
dem Hydrauliköl rumsauen
das "Lock Pit" aus. Antrieb per Hydraulik oder Stellmotor ist vermutlich unbezahlbar.
UPDATE:
[imgegc]http://calisto.info/jabog/pit/t13_1.jpg[/imgegc]
[imgegc]http://calisto.info/jabog/pit/t13_2.jpg[/imgegc]
[imgegc]http://calisto.info/jabog/pit/t13_3.jpg[/imgegc]
[imgybz]http://www.calisto.info/jabog/jabogcallisto3.jpg[/imgybz]
1. Staffel "Threshing Tigers", 1. Schwarm "Tigers", Second Element Lead
1. Staffel "Threshing Tigers", 1. Schwarm "Tigers", Second Element Lead
-
JaBoG32_Laud

- Professional
- Beiträge: 5241
- Registriert: 24. Nov 2003, 14:05

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Calli, bezüglich einem 3-D CAD wurde ich bei Alibre fündig. Die Bedienung finde ich halbwegs verständlich und intuitiv. Auch habe ich die Funktion Kollisionsabfrage gefunden, was dich interessieren könnte. Die Google Sketchup Files konnte ich leider nicht importieren. Wenn es dich interessiert, findest du auf der angegebenen Homepage eine abgespeckte Version zum Donwload. Die Limitation ist, dass nicht x-beliebig viele Teile in einer Baugruppe zusammengefügt werden können.
https://www.alibre.com/products/
https://www.alibre.com/products/

@Laud: der Stahlrahmen und die Lager sind nicht so teuer. Hab ja etwas ähnliches schonmal vor 10 Jahren von Hand zusammengeschweißt
@Pjotr: Danke, ich schaus mir an. UPDATE: Im Freewareteil fehlt [url=http://www.alibre.com/products/addons/a ... ion.aspc3y]"Alibre Motion"[/urlc3y] , dass ich unbedingt bräuchte. Aber habe da noch ne Alternative aufgetan
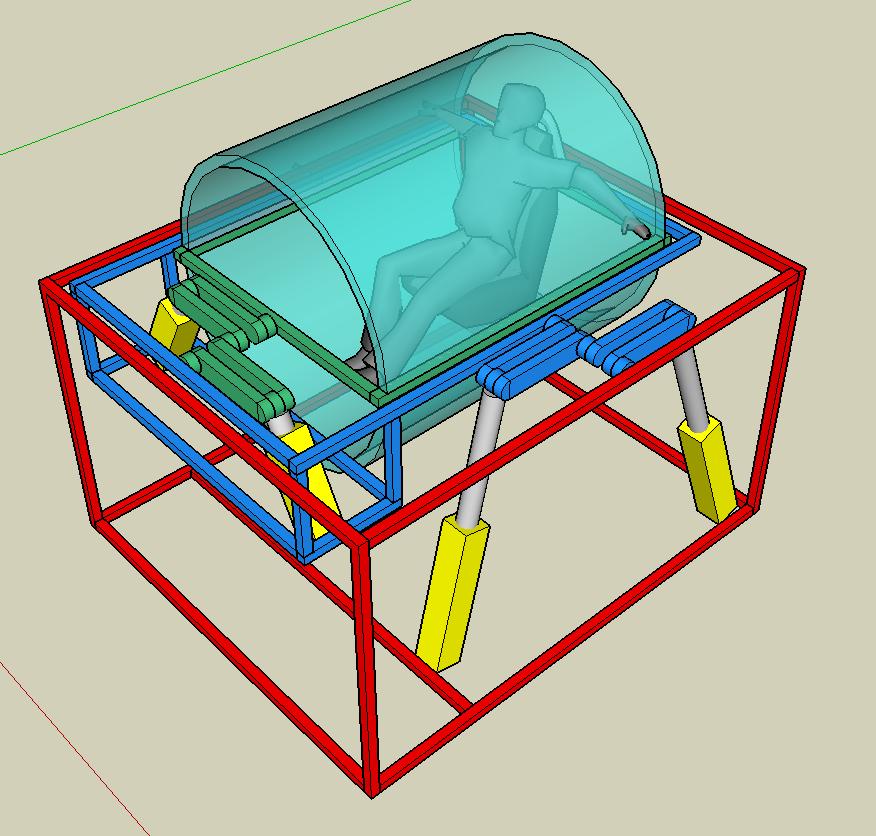
Ein paar vielleicht ernüchternde Kommentare zu dem obigen Entwurf:
---------------------------------------------------------------------------------
Rein mechanistisch ist das gute Stück insofern voll
funktionsfähig, als dass Rotationen um die X- und Y-Achse
vom Bewegungsablauf nun theoretisch uneingeschränkt möglich
sind.
Zwei Dinge sind noch unausgegoren:
1. Die Positionen der jeweils zwei Pneumatikzylinder vorn und
an der Seite sind ungünstig, da nicht in jeder Rotationsposition
des Pits auch immer sichergestellt ist, dass Kräfte in alle
benötigten Richtungen darstellbar sind, d.h. es gibt Stellungen,
von denen aus die Zylinder nur in eine einzige der zwei vorhandenen
Rotationsrichtungen Kraft ausüben können, aber nicht in beide.
Darüberhinaus besteht noch das klassische Problem des Totpunktes
beim Zwei-Takter-Prinzip.
2. Die Zylinderlängen und deren Gehäuse sind bzgl. der
benötigten Längen unzureichend, d.h. ein Vollaushub dürfte mit
dem gezeigten Design noch nicht möglich sein. Die Lösung hierzu
liegt aber schlicht in der Verlängerung und Erhöhung des Aufbaues,
um hier mehr Raum zu schaffen.
Von diesen zwei Punkten abgesehen, gibt es allerdings Einschränkungen,
die für die vorliegende Konstruktion fast schon K.O-Kriterien darstellen
und die mir nun nach und nach immer deutlicher werden, jetzt wo ein
erstes grobes Design im Vorentwurf vorhanden ist.
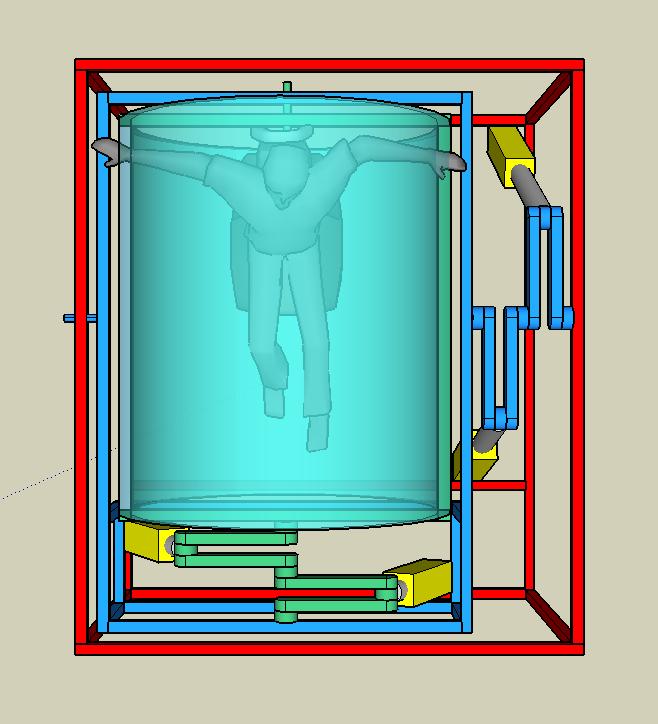
Die mit Abstand stärkste Einschränkung besteht in der Versorgung
der inneren Zelle ("Cola-Dose") mit Signalen und Energie. Benötigt
werden dort:
- Druckluft für Zylinder zum Antrieb der inneren X-Achszylinder
- Strom zum Betrieb des TFTs
- VGA Signal vom extern stehenden Rechner
- Signale von Tastatur, Joysticks, TrackIR zum externen Rechner
- div. weitere Signale zur Steuerung des Simpits, etc.pp.
Man stelle sich anhand der gezeigten Konstruktion vor, man
fliegt einen schlichten Looping. Das ist gleichbedeutend mit einer
vollen 360° Drehung des blauen inkl. grünen Konstruktionsbereichs.
Anschließend sind alle Versorungskabel und -schläuche einmal um
das Simpit gewickelt. Ein mehrfacher Looping wird gar völlig
unmöglich.... Ähnlich verhält es sich mit mehreren Rollen des
inneren grünen Konstruktionsbereiches um die X-Achse. Auch hier
kommen div. Kabel von außen nach innen schnell an Ihre Grenze.
Lösbar nur durch "Korrektur" der Position mit entsprechender
Programmierung der Steuerungssoftware, d.h. für den Looping
180° Drehung um die Längsachse, wenn Pitch 90° beträgt und das
gleiche -180° Retour bei Pitch -90, um die Ursprungspostion
wieder herzustellen und Verhedderung der Kabel & Schläuche
zu vermeiden. Subjektive Wirkung durch diese korrigierenden
Bewegungen auf den Piloten im innern: erwartet unrealisitisch.
Zusätzlich werden z.B. schnelle Manöver durch diesen Kunstgriff
praktisch unmöglich gemacht, da derlei Korrekturbewegungen des
Simpits vermutlich einiges an Zeit brauchen, wärend aber im
Softwaresimulator die Bewegung schon "weiter voraus" ist.
Dazu habe ich bislang noch keine Lösung, außer der Flucht nach vorn
und dem Gedanken, die Freiheitsgrade für mögliche Bewegungen
drastisch einzuschränken. Fraglich nur, ob sich dann der Aufwand
zeitlich wie kostenseitig noch "lohnt".
Soweit meine Gedanken....
@Pjotr: Danke, ich schaus mir an. UPDATE: Im Freewareteil fehlt [url=http://www.alibre.com/products/addons/a ... ion.aspc3y]"Alibre Motion"[/urlc3y] , dass ich unbedingt bräuchte. Aber habe da noch ne Alternative aufgetan
Ein paar vielleicht ernüchternde Kommentare zu dem obigen Entwurf:
---------------------------------------------------------------------------------
Rein mechanistisch ist das gute Stück insofern voll
funktionsfähig, als dass Rotationen um die X- und Y-Achse
vom Bewegungsablauf nun theoretisch uneingeschränkt möglich
sind.
Zwei Dinge sind noch unausgegoren:
1. Die Positionen der jeweils zwei Pneumatikzylinder vorn und
an der Seite sind ungünstig, da nicht in jeder Rotationsposition
des Pits auch immer sichergestellt ist, dass Kräfte in alle
benötigten Richtungen darstellbar sind, d.h. es gibt Stellungen,
von denen aus die Zylinder nur in eine einzige der zwei vorhandenen
Rotationsrichtungen Kraft ausüben können, aber nicht in beide.
Darüberhinaus besteht noch das klassische Problem des Totpunktes
beim Zwei-Takter-Prinzip.
2. Die Zylinderlängen und deren Gehäuse sind bzgl. der
benötigten Längen unzureichend, d.h. ein Vollaushub dürfte mit
dem gezeigten Design noch nicht möglich sein. Die Lösung hierzu
liegt aber schlicht in der Verlängerung und Erhöhung des Aufbaues,
um hier mehr Raum zu schaffen.
Von diesen zwei Punkten abgesehen, gibt es allerdings Einschränkungen,
die für die vorliegende Konstruktion fast schon K.O-Kriterien darstellen
und die mir nun nach und nach immer deutlicher werden, jetzt wo ein
erstes grobes Design im Vorentwurf vorhanden ist.
Die mit Abstand stärkste Einschränkung besteht in der Versorgung
der inneren Zelle ("Cola-Dose") mit Signalen und Energie. Benötigt
werden dort:
- Druckluft für Zylinder zum Antrieb der inneren X-Achszylinder
- Strom zum Betrieb des TFTs
- VGA Signal vom extern stehenden Rechner
- Signale von Tastatur, Joysticks, TrackIR zum externen Rechner
- div. weitere Signale zur Steuerung des Simpits, etc.pp.
Man stelle sich anhand der gezeigten Konstruktion vor, man
fliegt einen schlichten Looping. Das ist gleichbedeutend mit einer
vollen 360° Drehung des blauen inkl. grünen Konstruktionsbereichs.
Anschließend sind alle Versorungskabel und -schläuche einmal um
das Simpit gewickelt. Ein mehrfacher Looping wird gar völlig
unmöglich.... Ähnlich verhält es sich mit mehreren Rollen des
inneren grünen Konstruktionsbereiches um die X-Achse. Auch hier
kommen div. Kabel von außen nach innen schnell an Ihre Grenze.
Lösbar nur durch "Korrektur" der Position mit entsprechender
Programmierung der Steuerungssoftware, d.h. für den Looping
180° Drehung um die Längsachse, wenn Pitch 90° beträgt und das
gleiche -180° Retour bei Pitch -90, um die Ursprungspostion
wieder herzustellen und Verhedderung der Kabel & Schläuche
zu vermeiden. Subjektive Wirkung durch diese korrigierenden
Bewegungen auf den Piloten im innern: erwartet unrealisitisch.
Zusätzlich werden z.B. schnelle Manöver durch diesen Kunstgriff
praktisch unmöglich gemacht, da derlei Korrekturbewegungen des
Simpits vermutlich einiges an Zeit brauchen, wärend aber im
Softwaresimulator die Bewegung schon "weiter voraus" ist.
Dazu habe ich bislang noch keine Lösung, außer der Flucht nach vorn
und dem Gedanken, die Freiheitsgrade für mögliche Bewegungen
drastisch einzuschränken. Fraglich nur, ob sich dann der Aufwand
zeitlich wie kostenseitig noch "lohnt".
Soweit meine Gedanken....
[imgybz]http://www.calisto.info/jabog/jabogcallisto3.jpg[/imgybz]
1. Staffel "Threshing Tigers", 1. Schwarm "Tigers", Second Element Lead
1. Staffel "Threshing Tigers", 1. Schwarm "Tigers", Second Element Lead